The Resilient Intelligent Systems Lab (RISLab) is part of Carnegie Mellon University’s Robotics Institute. The lab, led by PI Wennie Tabib, improves the performance and reliability of autonomous systems.
News
-
May 26, 2026
Two papers will be presented at ICRA 2026
RISLab will present two papers at ICRA 2026 this year! The two papers are Quadrotor Navigation using Reinforcement Learning with Privileged Information and Zero-Shot Metric Depth Estimation via Monocular Visual-Inertial Rescaling for Autonomous Aerial Navigation. See you at ICRA!
Read more » -
June 25, 2025
RSS 2025 Workshop on Gaussian Representations for Autonomy: Challenges and Opportunities
RISLab and MIT researchers held a RSS workshop in Los Angeles, CA this past week. The workshop covered topics including continuous scene representations, collision avoidance, active sensing, and multi-modal reasoning. More information may be found at the following link https://sites.google.com/view/gmm-workshop-rss25.
Read more » -
June 15, 2025
Paper acceped for presentation at IROS 2025!
Congratulations to Kshitij for his accepted paper to the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025)! The paper may be accessed here.
Read more »
Active Research Projects
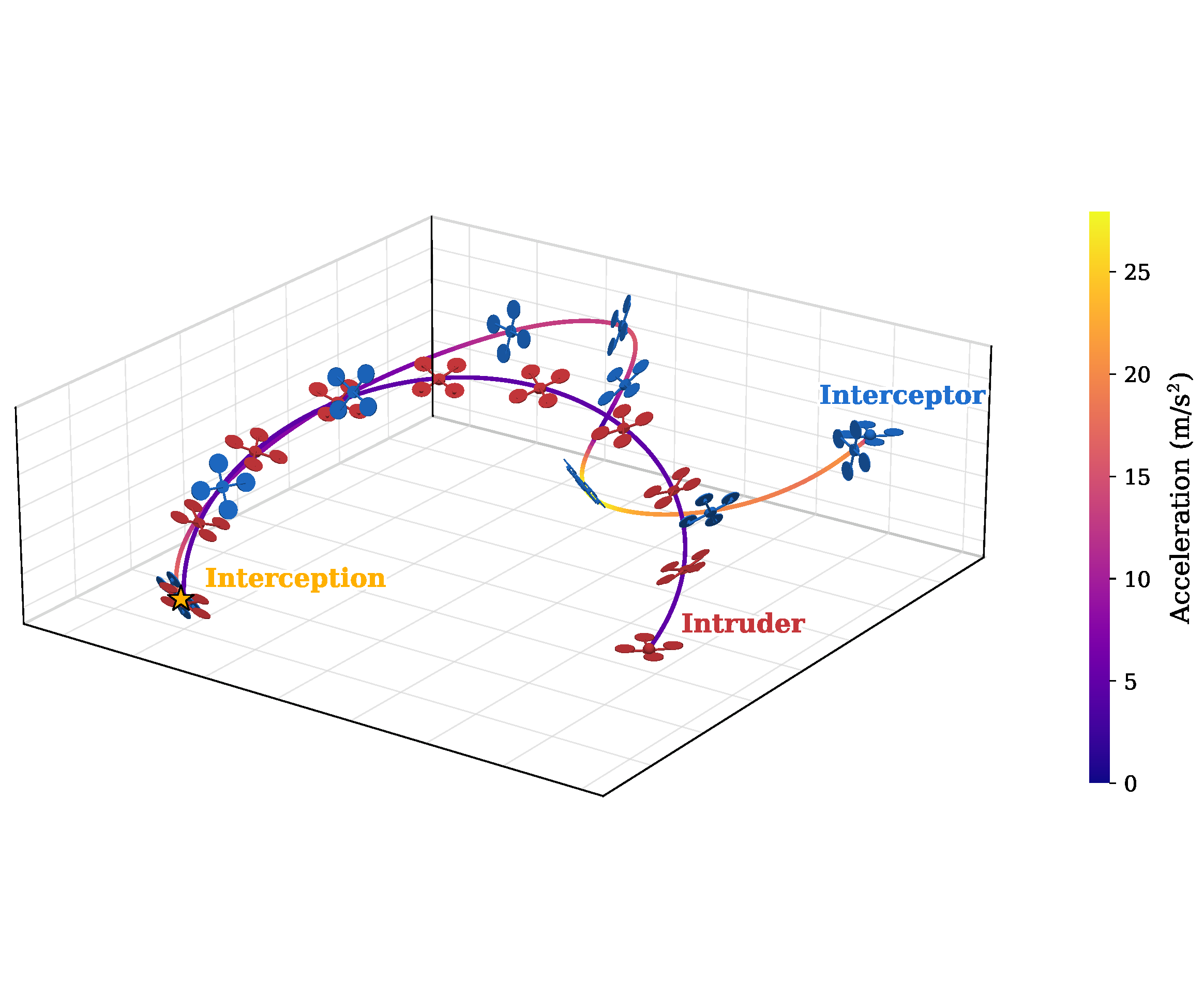
Learning Agile Intruder Interception using Differentiable Quadrotor Dynamics
An end-to-end control policy trained via differentiable simulation for interception using only 3D direction vectors.


AcroRL: Learning Aggressive Quadrotor Inversion using Bidirectional Thrust
This research enables compact, position-constrained quadrotor inversions by modulating reference trajectories using reinforcement learning.

Rapid Navigation in Diverse Environments
This research innovates techniques for rapid navigation in forests, caves, and other cluttered, unstructured environments.





Large-Scale Decentralized Multirobot Active Search
This research project leverages reinforcement learning to enable decentralized multirobot active search over large scales.

Scalable and Adaptive Aerial Robotic Exploration
This research project develops mapping and planning methods for multirotors to enable memory-efficient exploration while generating a high-fidelity map of the environment.

Assistive Adaptive-Speed Multirotor Teleoperation
This research project seeks to improve assistance to humans operating multirotors through narrow gaps and tunnels.


People
Faculty
Postdoctoral Fellows
Staff
PhD Students

MS Students
Undergraduate Students

Robots

Acerodon

Crazyflie

Danaus
Omicron