Method
Key Insight: Our method learns feedforward trajectory modulation over the full system dynamics by explicitly modeling thrust asymmetry, reversal delay, and stochasticity, guided by an almost globally stabilizing geometric controller.
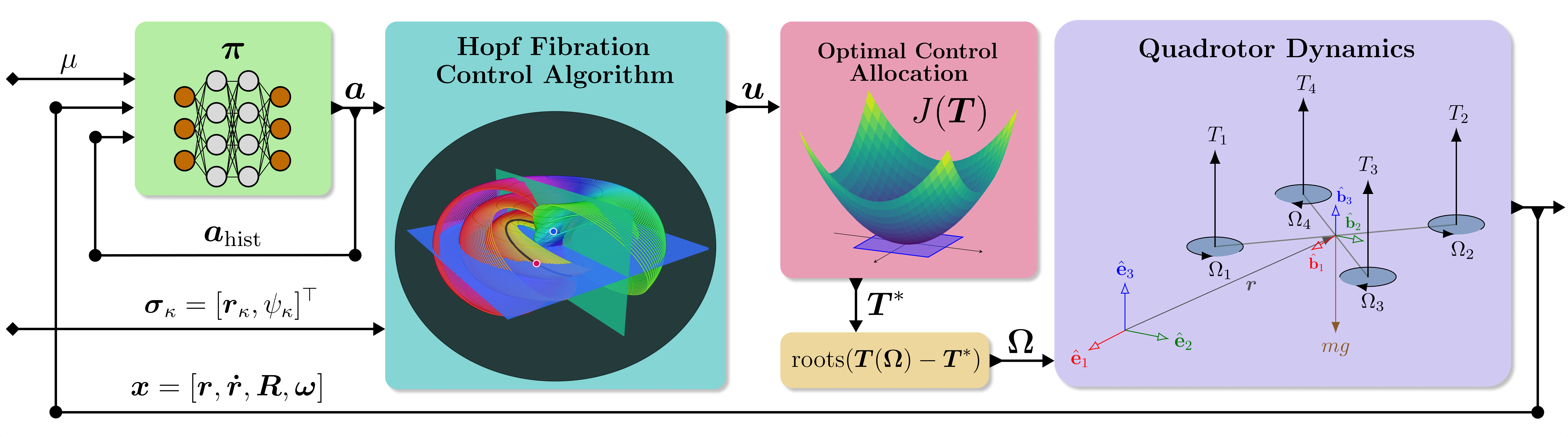
Overview of the proposed method.
A reference modulation policy \(\boldsymbol{\pi}\), activated with inversion flag \(\mu\),
observes the robot state \(\boldsymbol{x}\) and finite action history
\(\boldsymbol{a}_\text{hist}\) to produce a position reference modulation and thrust posture,
\(\boldsymbol{a} = [\boldsymbol{r}_{\delta\kappa}, \eta]\).
These outputs and differentially flat reference \(\boldsymbol{\sigma}_{\kappa}\) are mapped
through a Hopf fibration-based control algorithm to generate control input
\(\boldsymbol{u} = [f_c, \boldsymbol{\tau}]\), passed to a box-constrained optimal control
allocation that computes optimal thrust commands \(\boldsymbol{T}^*\). Finally, these are
converted to motor rates \(\boldsymbol{\Omega}\) via an asymmetric thrust model and
executed on the quadrotor dynamics.