Fast and Agile Vision-Based Flight with Teleoperation and Collision Avoidance on a Multirotor
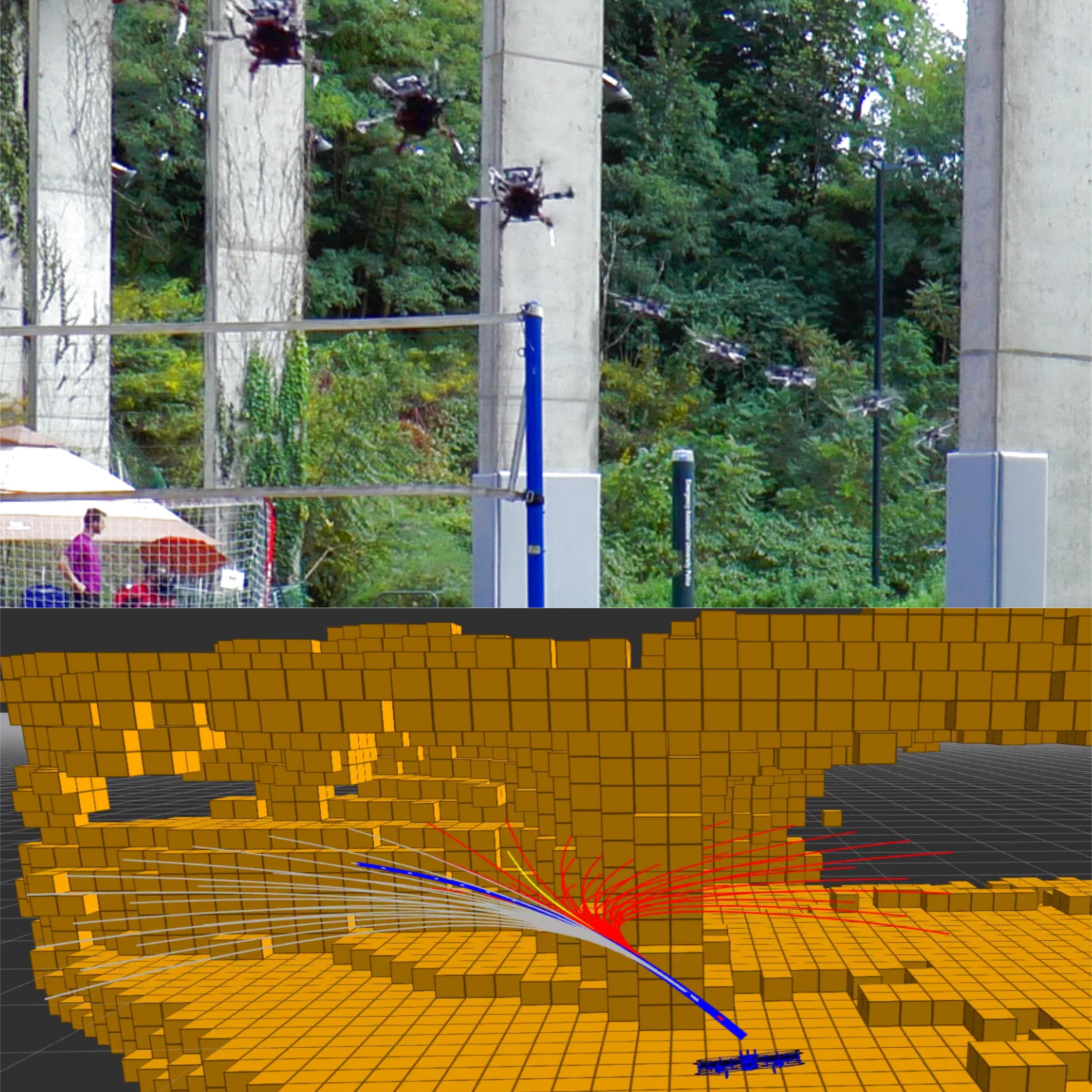
We present a multirotor architecture capable of aggressive autonomous flight and collision-free teleoperation in unstructured, GPS-denied environments. The proposed system enables aggressive and safe autonomous flight around clutter by integrating recent advancements in visual-inertial state estimation and teleoperation. Our teleoperation framework maps user inputs onto smooth and dynamically feasible motion primitives. Collision-free trajectories are ensured by querying a locally consistent map that is incrementally constructed from forward-facing depth observations. Our system enables a non-expert operator to safely navigate a multi-rotor around obstacles at speeds of 10 m/s. We achieve autonomous flights at speeds exceeding 12 m/s and accelerations exceeding 12 m/s 2 in a series of outdoor field experiments that validate our approach.
People

Alex Spitzer

Xuning Yang

John Yao

Aditya Dhawale


Mosam Dabhi

Matthew Collins

Curtis Boirum

Nathan Michael
Robots
