Reactive Collision Avoidance Using Real-Time Local Gaussian Mixture Model Maps
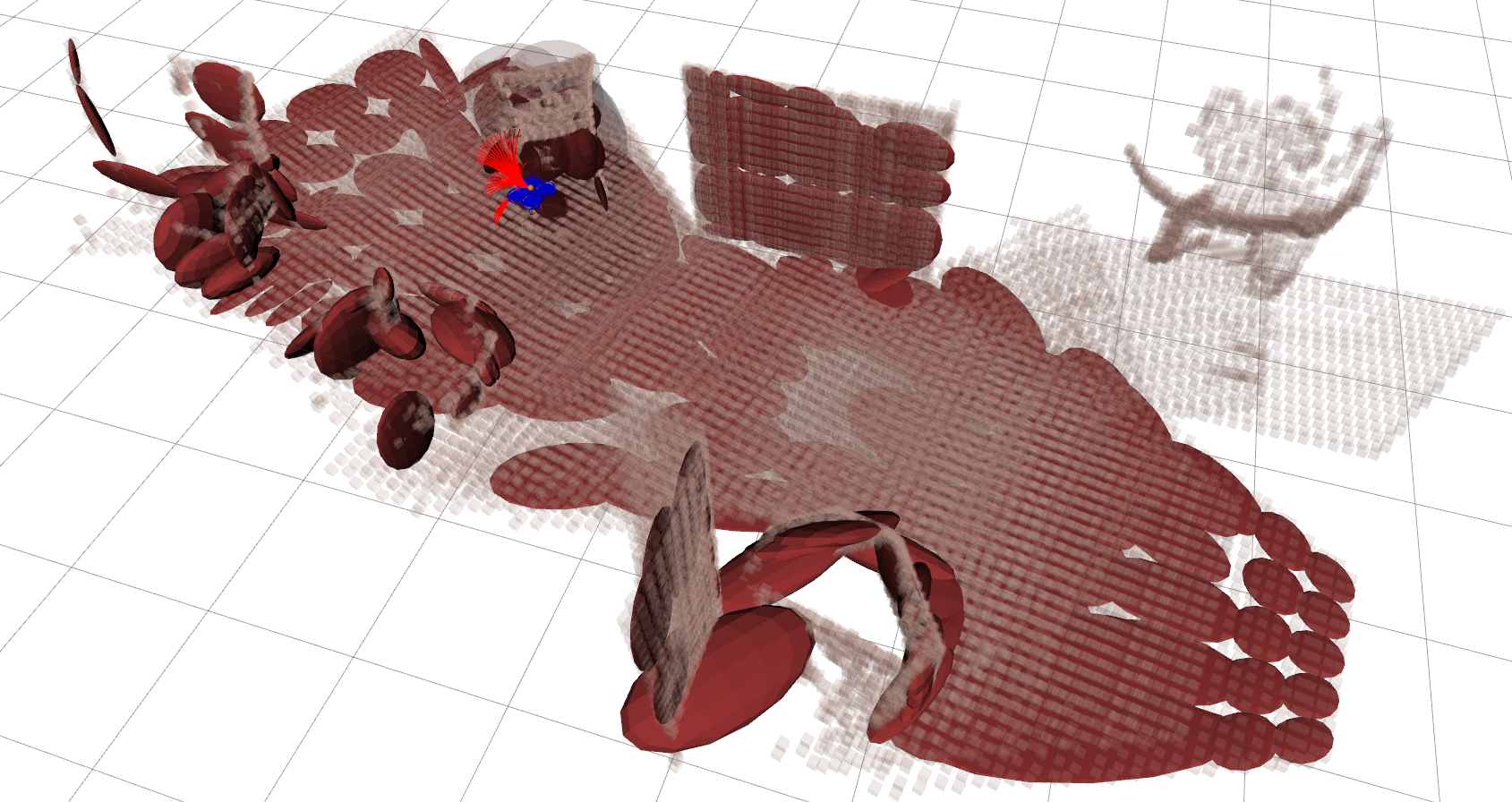
In unknown, cluttered environments, robots require online real-time mapping and collision checking in order to navigate robustly. Discrete map representations are inefficient for collision checking as they are expensive in terms of memory and compute. This paper takes a probabilistic approach to local mapping by representing the environment as a Gaussian Mixture Model, and leverages geometric properties to enable efficient collision checking given a time-parameterized trajectory. In contrast to current discretization-based methods, a Gaussian mixture model guarantees probabilistic completeness in its representation and thus preserves geometric coverage of the environment without losing representation accuracy with varying map resolutions. We introduce a novel GMM local mapping algorithm that can be used with a single depth camera processed on a single CPU, and provide algorithms for collision avoidance given arbitrary trajectory representations. Finally, we provide experimentation results demonstrating safety, efficiency, and map fidelity for real-time collision avoidance with a quadrotor navigating in a cluttered environment.
People

Aditya Dhawale

Xuning Yang
