Online planning for human – multi-robot interactive theatrical performance
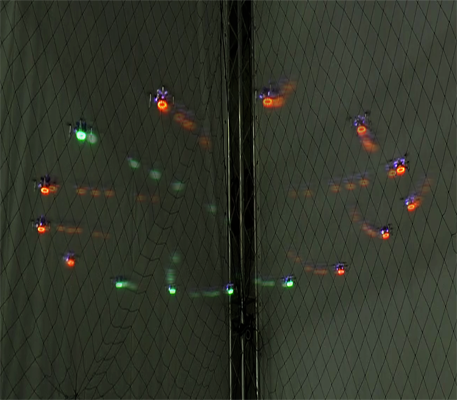
We propose and evaluate a multi-robot system designed to enable live, improvisational theatric performance through online interaction between a performer and a robot system. The proposed system translates theatric performer intent into dynamically feasible trajectories for multi-robot ensembles without requiring prior knowledge of the ordering or timing of the desired robot motions. We allow a user to issue detailed instructions composed of desired motion descriptors in an online setting to specify the motion of varying collectives of robots via a centralized system planner. The centralized planner refines user motion specifications into safe and dynamically feasible trajectories thereby reducing the cognitive burden placed on the performer. We evaluate the system on a team of aerial robots (quadrotors), and show through offline simulation and online performance that the proposed system formulation translates online input into non-colliding dynamically feasible trajectories enabling a fleet of fifteen quadrotors to perform a series of coordinated behaviors in response to improvised direction from a human operator.
People

Ellen A. Cappo

Arjav Desai

Matthew Collins

Nathan Michael
Robots
